Things we have done
- Showing
- All
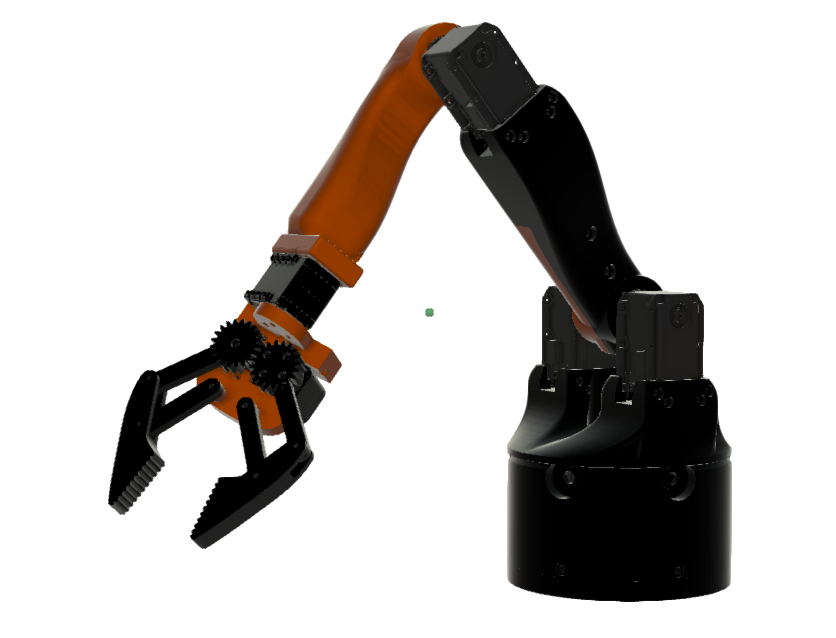
Fenrir: 3D Printed Robotic Arm
robotics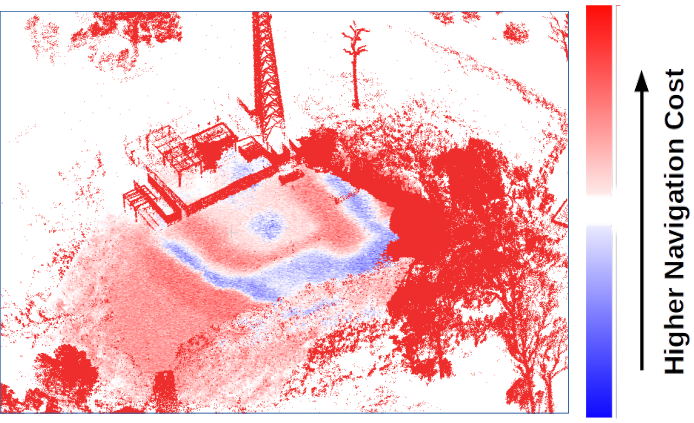
Three-dimensional Mapping with Augmented Navigation Cost
computer vision / robotics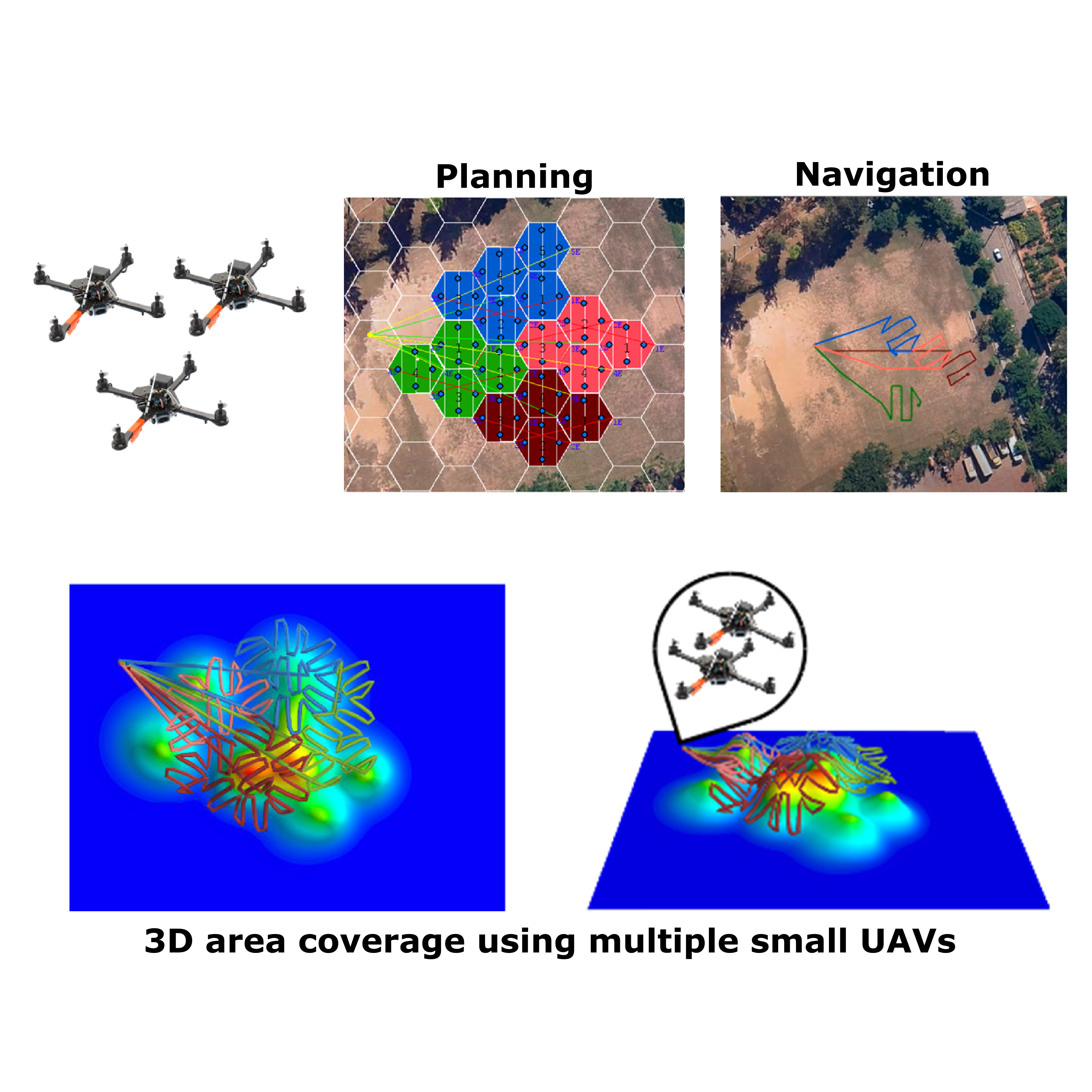
Cooperative Area Coverage Using Hexagonal Segmentation
robotics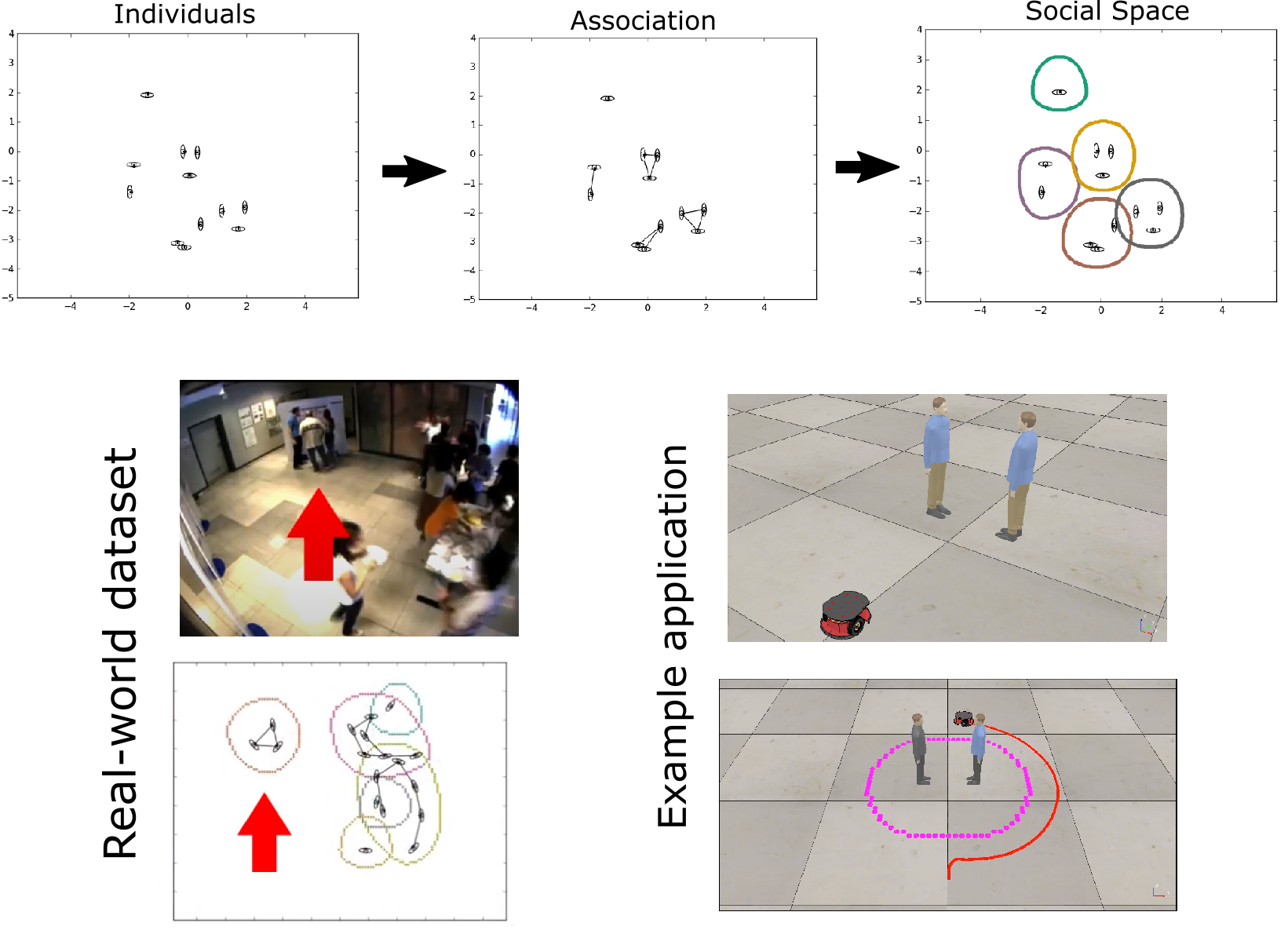
Determining the Association of Individuals and the Collective Social Space
robotics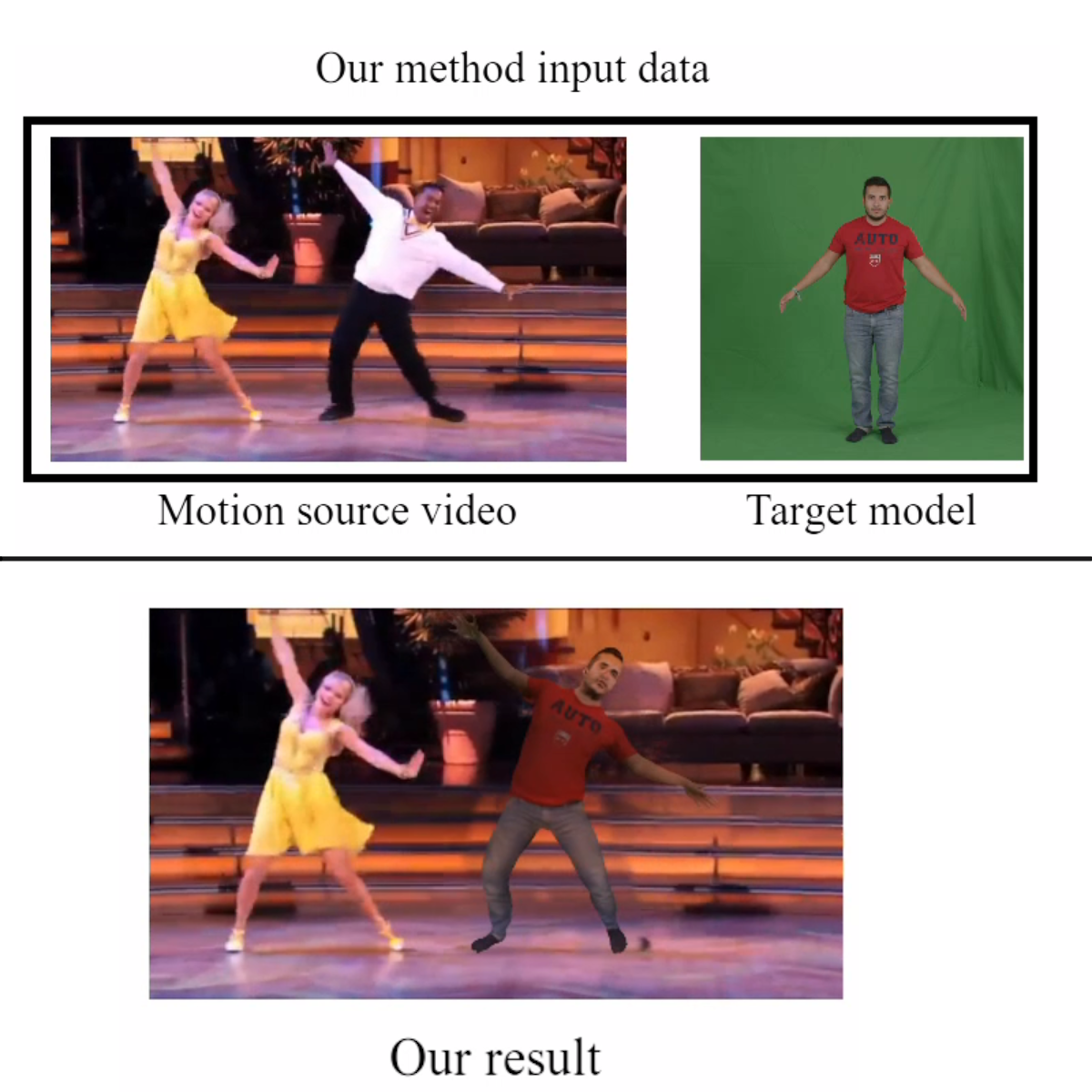
Human Motion Analysis
computer graphics / computer vision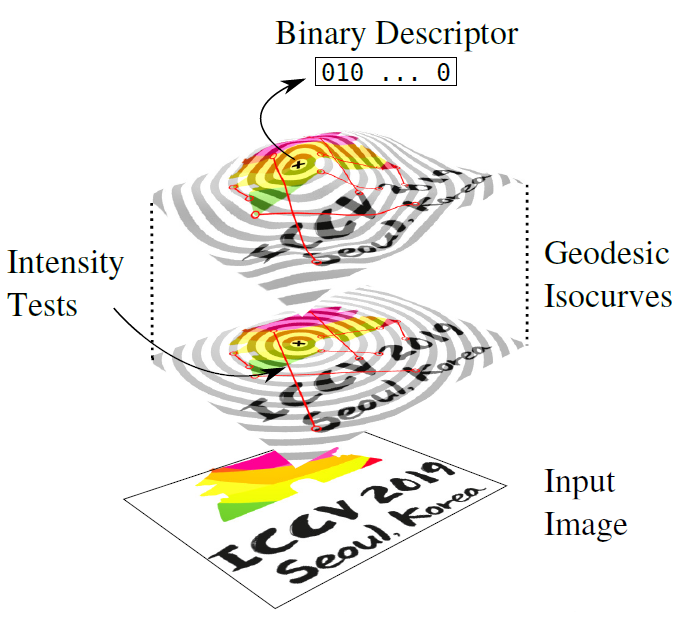
RGB-D Descriptor for non-rigid deformations
computer vision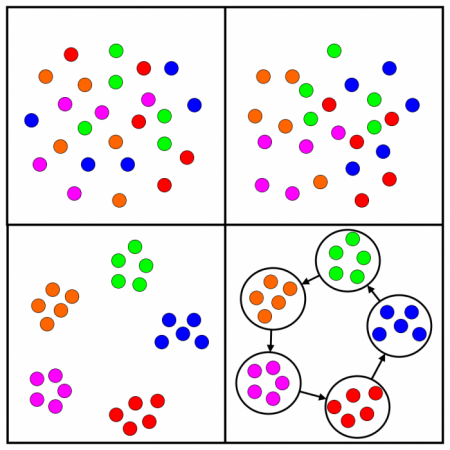
Robotic Swarm Segregation
robotics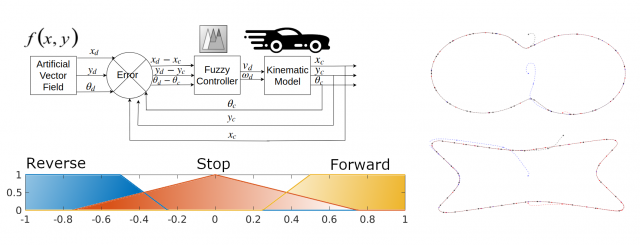
Control Strategies for Robot Navigation
robotics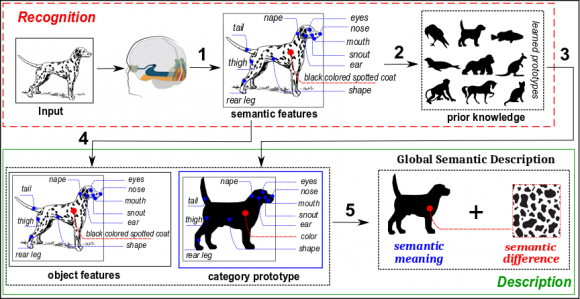
Semantic Description of Objects in Images Based on Prototype Theory
computer vision
Semantic Mapping for Visual Robot Navigation
computer vision / robotics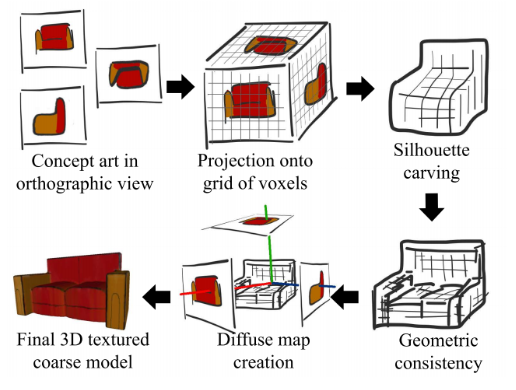
A 3D modeling methodology based on a concavity-aware geometric test to create 3D textured coarse models from concept art and orthographic projections
computer graphics
Detecting Landmarks on Faces in Different Domains
computer vision
Underwater Imaging
computer vision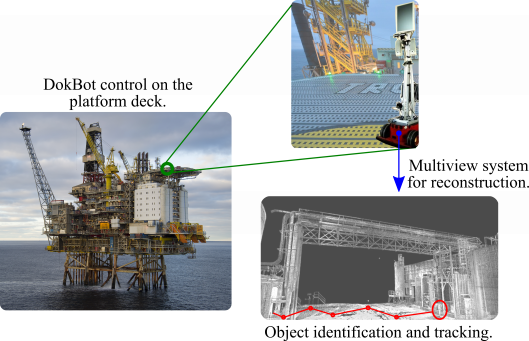
Multiview system for monitoring the C & M process.
computer vision / robotics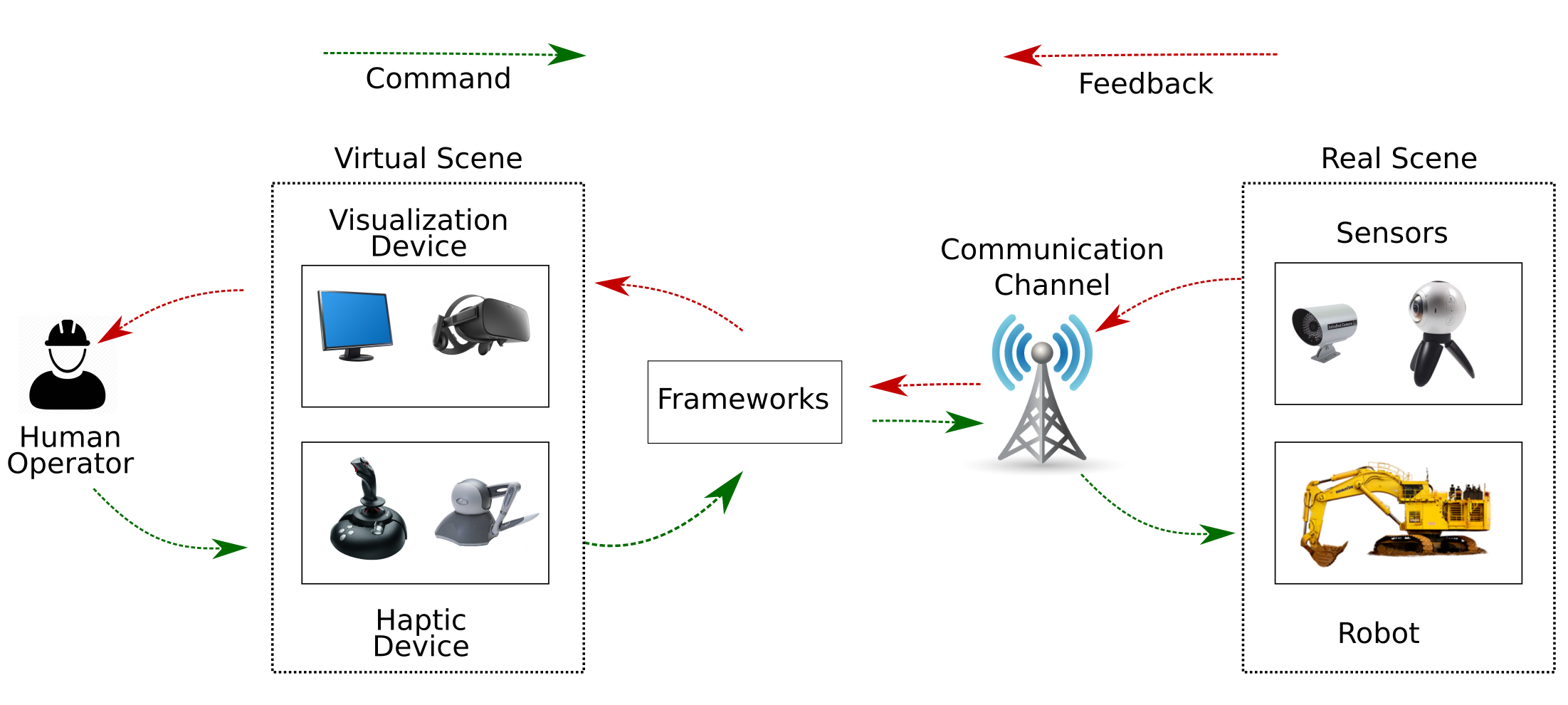
Advanced teleoperation of mining equipment: bulldozer
computer vision / robotics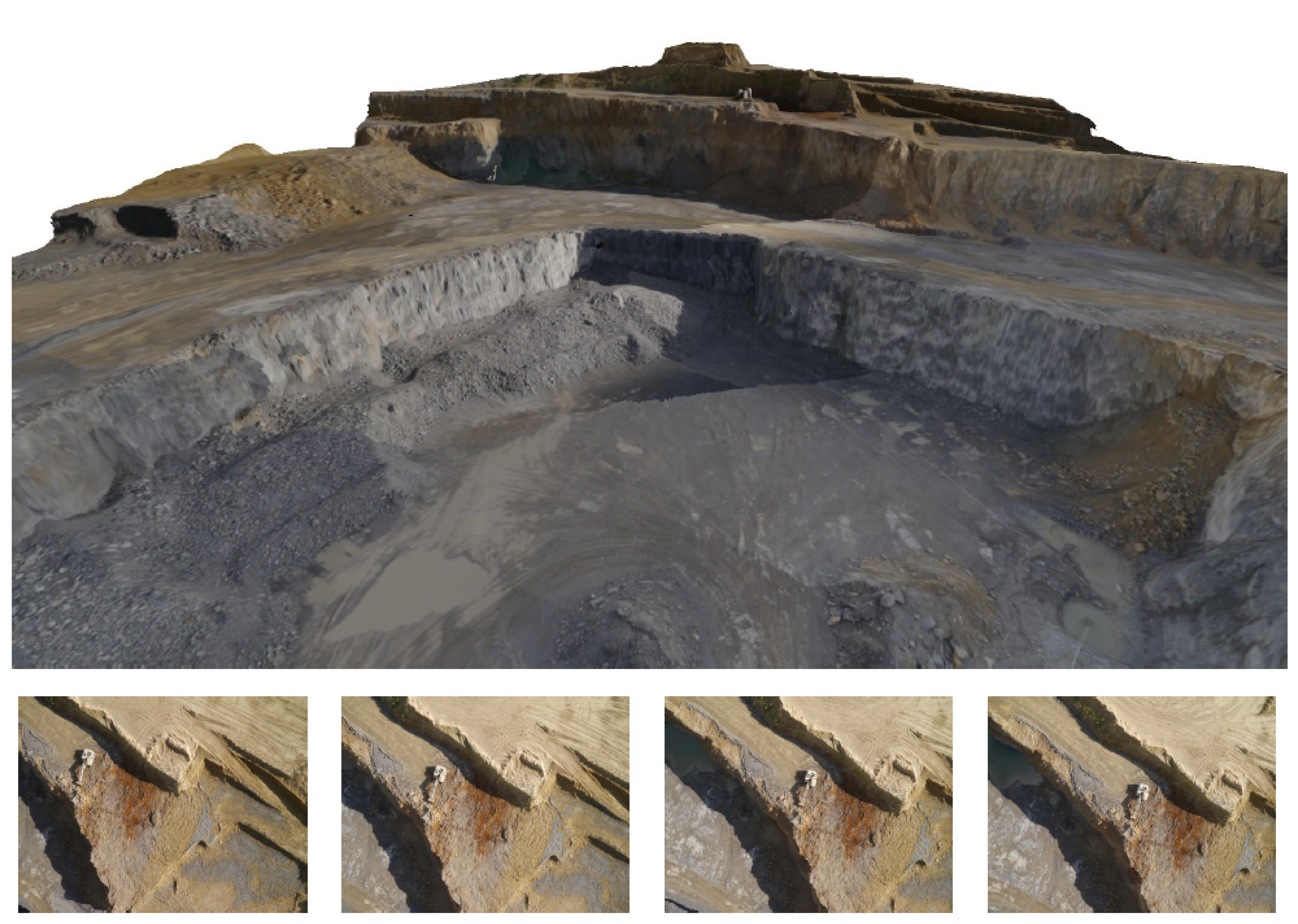
Three-Dimensional Reconstruction from Large Image Datasets
computer vision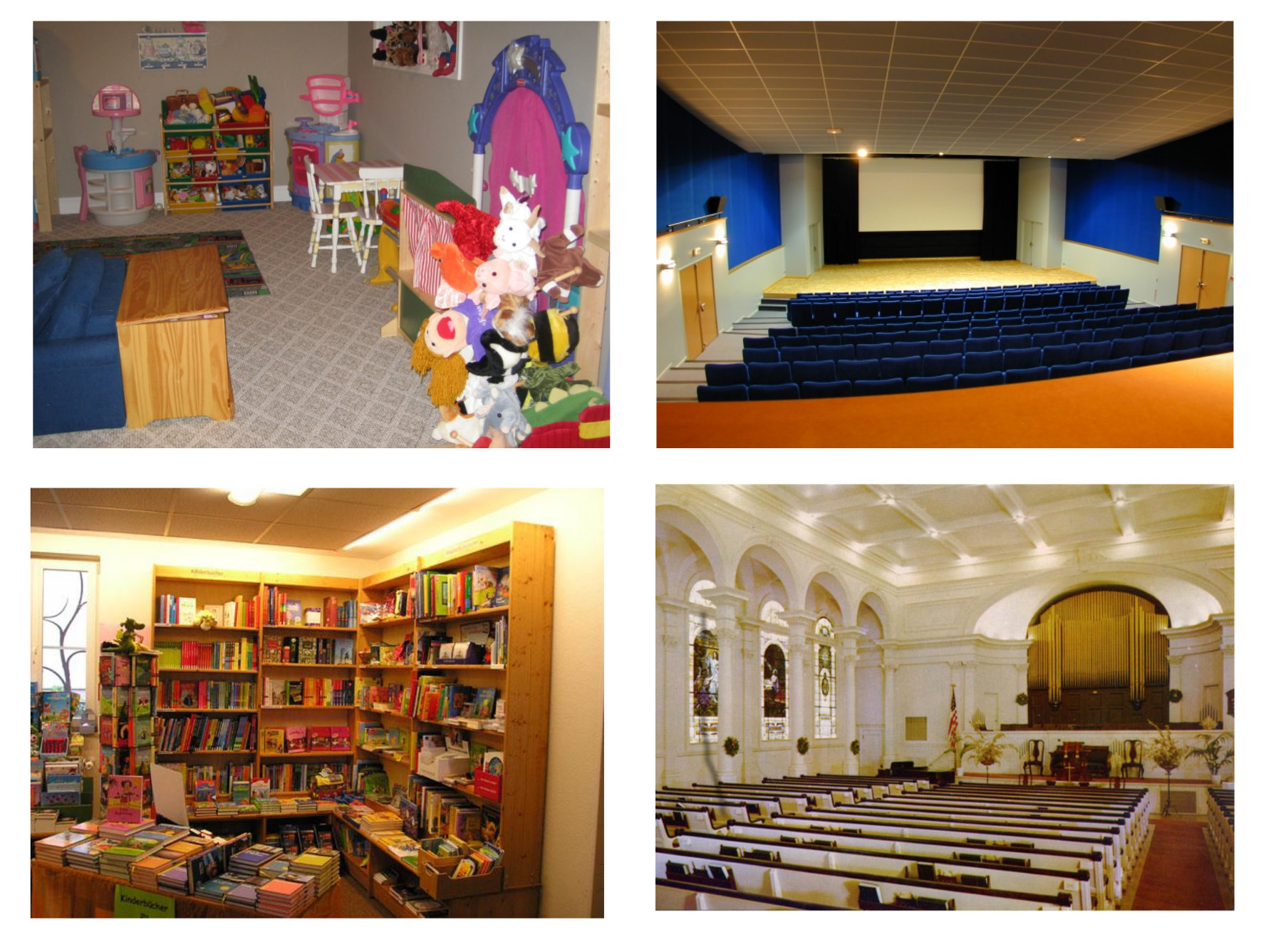
Scene Understanding
computer vision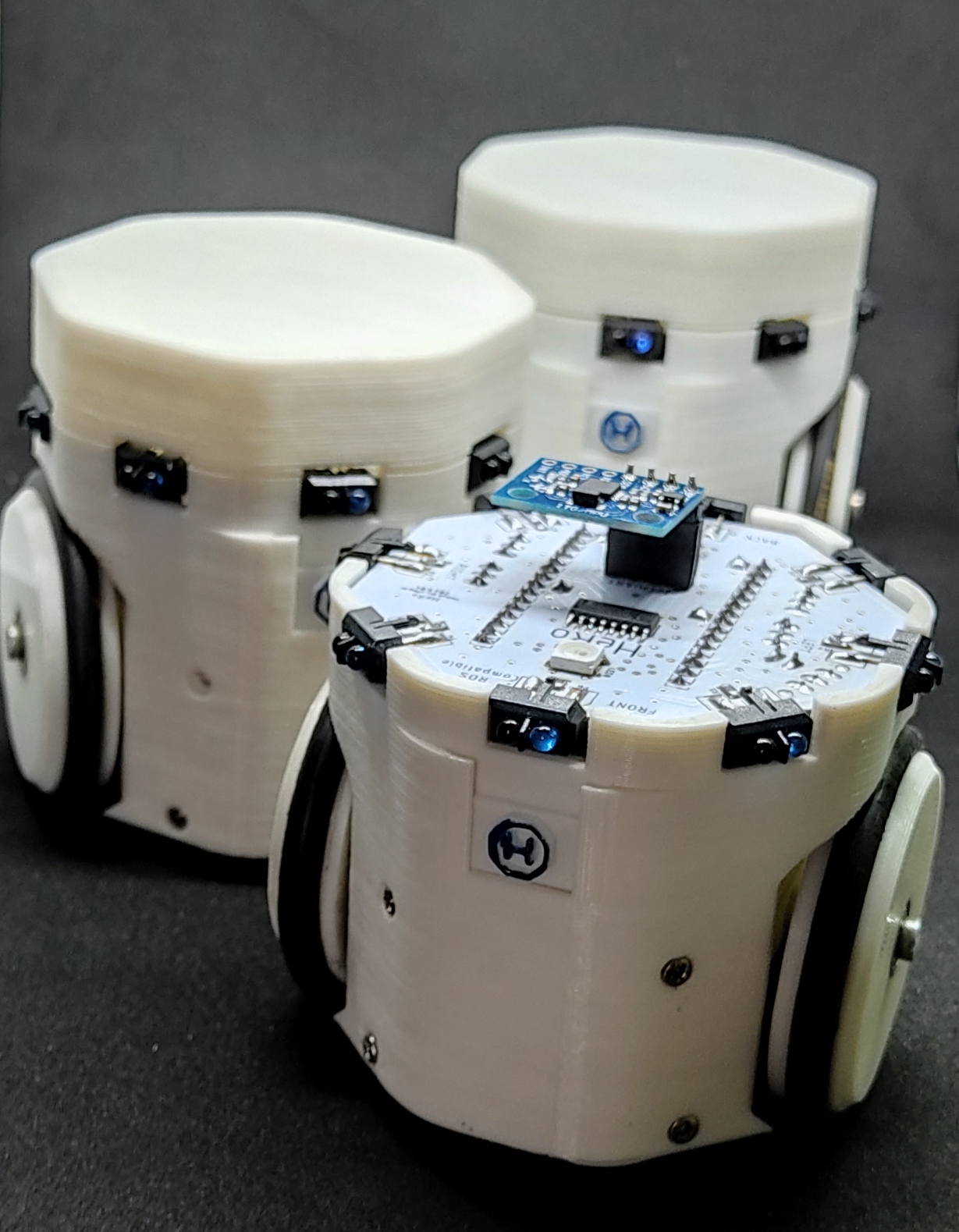
HeRo: An Open Platform for Robotics Research and Education
robotics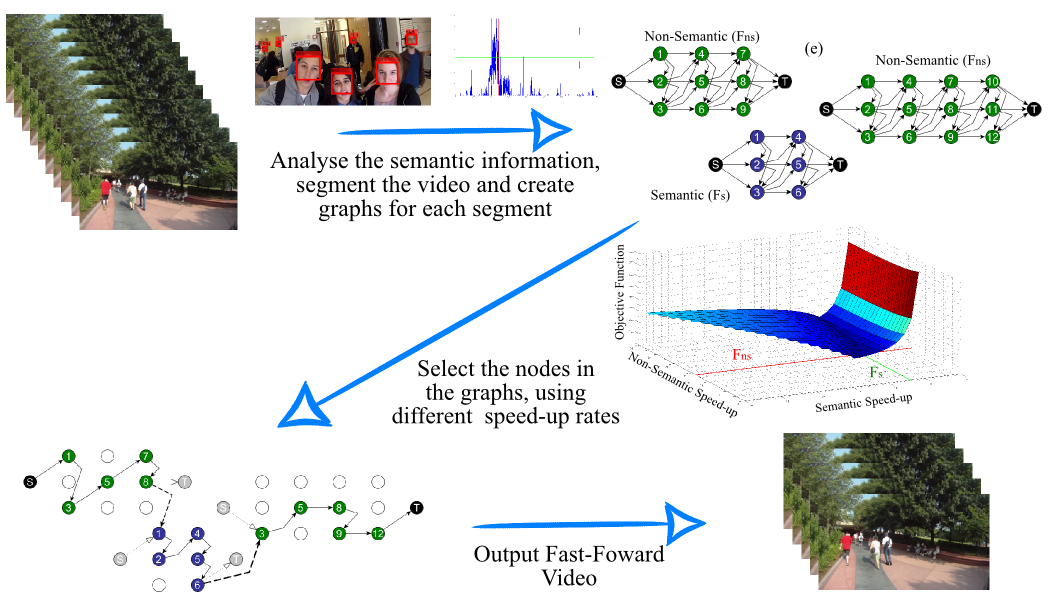
Semantic Hyperlapse Video
computer vision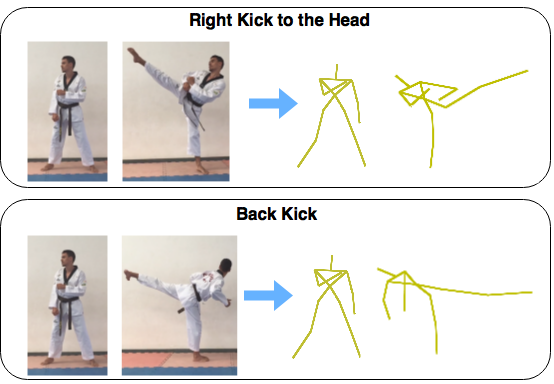
High Performance Moves Recognition and Sequence Segmentation
computer vision
MultiUAV Coordination and Control
robotics