
Advanced teleoperation of mining equipment: excavator
This project aims to investigate the teleoperation of mining equipment, focusing primarily on the bulldozer. In this context, teleoperation can be defined as equipment operation at a distance. It is very desirable that users can be able to interact with the remote environment naturally. In other words, the interaction should provide the user the sensation of being present at the site by offering information from different sensors, that is known as telepresence.
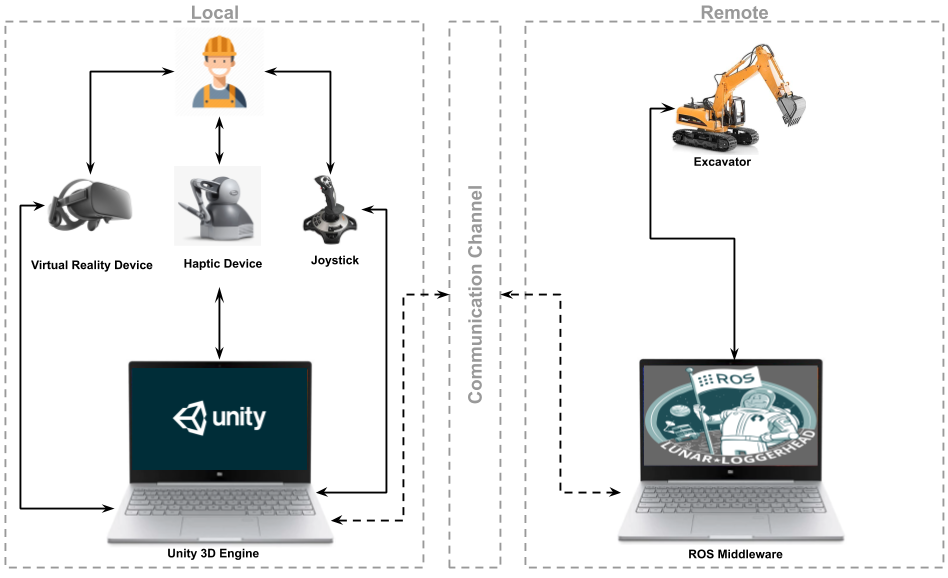
The project is divided into two main modules: operation and immersion. The operation module is responsible for acquiring information from the remote environment and perform physical interaction commanded by the user. The immersion module offers an immersive environment that gives the operator the sensation of presence and provides a virtual scenario. This research project involves advanced technologies such as active vision, tridimensional reconstruction, haptics interfaces, data visualization, trajectory planning, computer vision, and mobile robotics techniques.
Finally, the properties of mining processes are studied and explored to evaluate the impact and viability of our research in the Vale process.
Experimental Platforms
Laser Hokuyo
Camera 360 Ricoh Theta
Camera RGBD Intel RealSense

Virtual Environment Developed

Publications
[LARS 2018] Paulo Rezeck, Bruna Frade, Jéssica F. Soares, Luan G. Pinto, Felipe Cadar, Hector Azpurua, Douglas Macharet, Luiz Chaimowicz, Mário Campos, Gustavo Freitas. Framework for Haptic Teleoperation of a Remote Robotic Arm Device, IEEE LARS 2018 – 15th Latin American Robotics Symposium, 2018. Visit the page for the code and paper access.
[LARS 2018] Paulo Rezeck, Felipe Cadar, Jéssica F. Soares, Bruna Frade, Luan G. Pinto, Hector Azpurua, Douglas Macharet, Luiz Chaimowicz, Mário Campos, Gustavo Freitas. An Immersion Enhancing Robotic Head-Like Device for Teleoperation, IEEE LARS 2018 – 15th Latin American Robotics Symposium, 2018. Visit the page for the code and paper access.
[SBAI 2019] Matheus V. Lima, André Cid, Felipe Cadar, Luan Pinto, Paulo Rezeck, Thiago Grabe, Gustavo Freitas, Douglas Macharet, Gustavo Pessin, Luiz Chaimowicz, Mario Campos.. Realimentaçao de Força para Teleoperaçao de Escavadeiras, SBAI 2019 – 14th Simpósio Brasileiro de Automação Inteligente, 2019. Visit the page for the code and paper access.
Videos
Sponsor
This project is supported by Instituto Tecnológico da Vale (ITV). 
Team

Paulo Alfredo Frota Rezeck
PhD Student
Lucas Carvalho Gonçalves
MSc Student
Luan Gabriel Nunes Pinto
Undergraduate Student
Mario F. M. Campos
Coordinator
Douglas Guimarães Macharet
Associate Professor
Erickson Rangel do Nascimento
Associate Professor
Luiz Chaimowicz
ProfessorFormer Members

Felipe Cadar Chamone
PhD Student
Matheus Veiga de Lima
Researcher
Héctor Ignacio Azpúrua Perez-Imaz
Associate Professor
Thiago Meireles Grabe
MSc Student
Bruna Vieira Frade
MSc Student